
SYNSCAPES
Dataset layout, features and annotations
| OVERVIEW | FEATURES | WHITE PAPER AND CODE | DOWNLOAD |
How many cars are visible in a given image? Is the sky clear or cloudy? Synscapes provides a wide range of metadata which helps characterize each image.
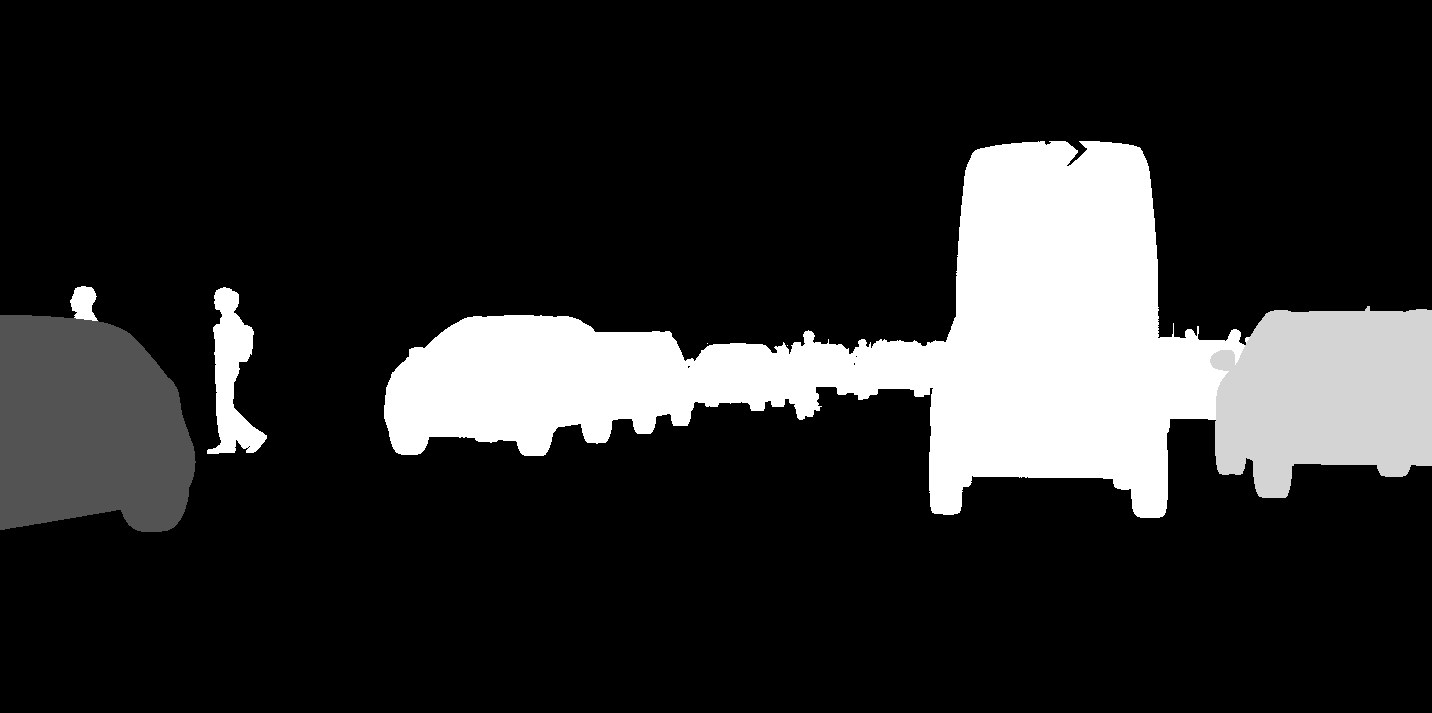
Additionally, Synscapes offers information that is difficult for humans to annotate, such as accurate per-instance visibility.
dataset Layout
Synscapes is organized into the following directories:
|-- img
| |-- class [1-25000].png
| |-- depth [1-25000].exr
| |-- instance [1-25000].png
| |-- rgb [1-25000].png
| |-- rgb-2k [1-25000].png
|-- meta [1-25000].json
Image resolution
Synscapes' native resolution is 1440x720, stored in the img/rgb folder. In order to best support training with architectures designed for Cityscapes, we also include an up-scaled version at 2048x1024 resolution in img/rgb-2k. Note that this up-scaling precedes the sensor simulation stage, ensuring pixel noise is present at the appropriate scale.
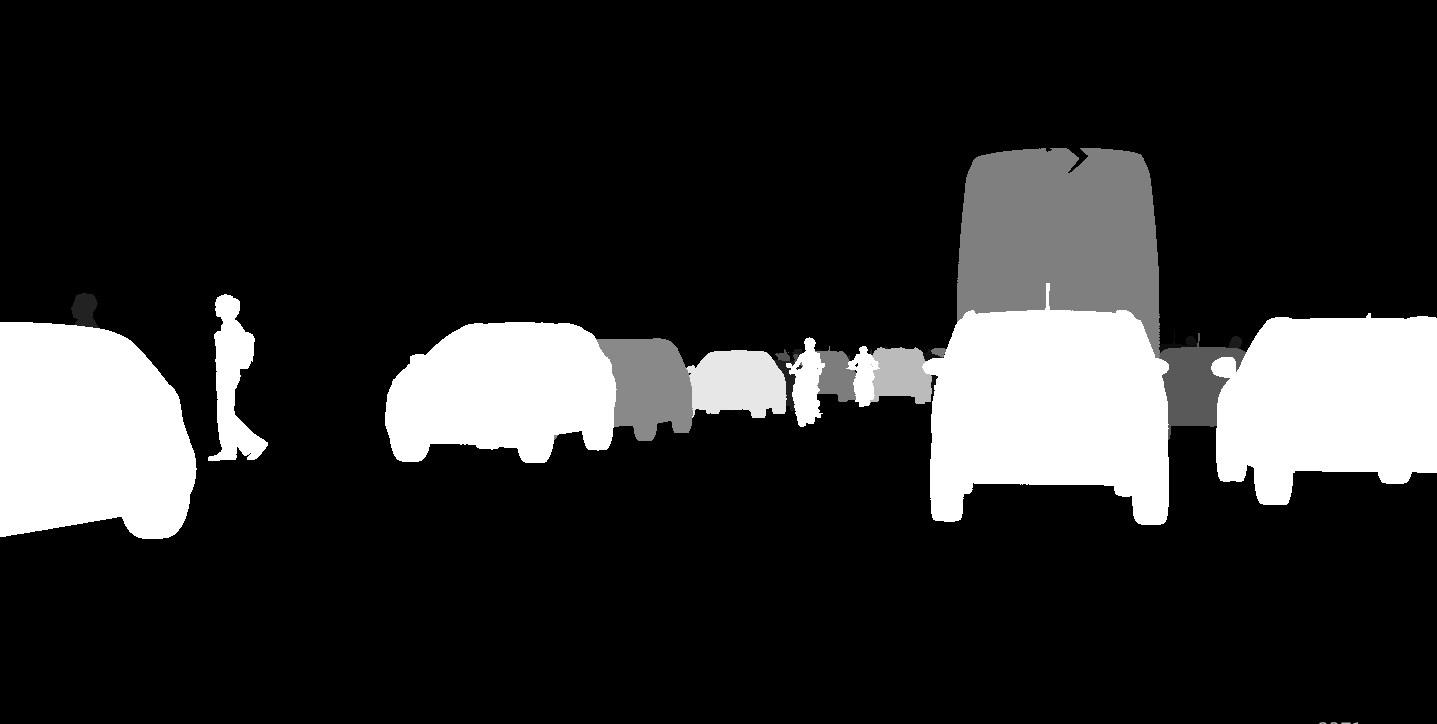
Annotations
RGB data

Class as single-channel PNG (visualized in color below)
The class annotations follows the Cityscapes convention.

Instance as PNG
The instance id can be found as R + G * 256 + B * 256^2.

Depth as floating point OpenEXR
Stores the planar depth (not distance) in meters.

Camera metadata
The camera's position and field of view is as follows:
"camera": {
"extrinsic": {
"pitch": 0.038,
"roll": -0.0,
"x": 1.7,
"y": 0.1,
"yaw": -0.0195,
"z": 1.22
},
"intrinsic": {
"fx": 1590.83437,
"fy": 1592.79032,
"resx": 1440,
"resy": 720,
"u0": 771.31406,
"v0": 360.79945
}
}
Instance metadata
2D Bounding Boxes
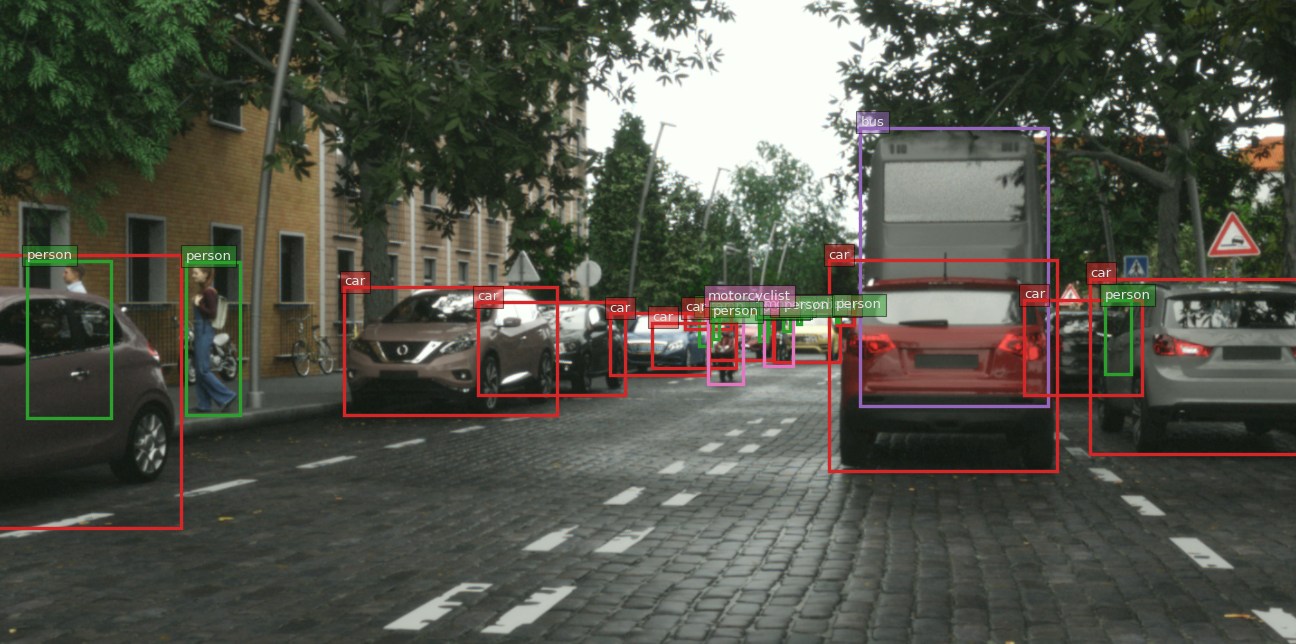
3D Bounding Boxes in ego-vehicle coordinates

Occlusion (fraction of object hidden behind other objects)
Truncation (fraction of object outside field of view)
Note: 'class' is also recorded in the JSON file, to facilitate instance-to-class mapping without having to refer to the PNG file.
Scene Metadata
altitude_variation
The largest altitude difference in the scene in meters.
curb_height
The height of the sidewalk curb in meters.
dist_*_{mean,stddev}
For each actor class, contains the mean and standard deviation of distance for all visible instances.
ego_speed
The speed in m/s traveled by the ego vehicle at the time of image capture.
fence_{presence,height}
Indicates whether fences are present in the image. Note that due to occlusion, it may be hidden behind another object. Height is measured in meters.
median_presence
Whether the road median is present.
num_*
For each actor class, contains the number of visible instances.
parking_{presence,angle}
Whether a parking lane is present, and whether cars park at 0 (parallel), 45 or 90 degrees.
rel_dist_to_isect
Relative distance to nearest intersection. 0.0 indicates ego vehicle is inside the intersection, 1.0 indicates it is one city block away from the next intersection.
road_material_type
Integer representing the material used for the road surface.
sidewalk_width
The width of the sidewalk in meters
sky_contrast
Contains the logarithm of the sky's contrast, measured as max/mean. Values around 2-3 indicate fully overcast sky, 5-6 indicate direct sunlight.
sun_height
The normalized angular height of the sun. 0.0 indicates sunset/sunrise, 1.0 indicates zenith.
wall_{presence,height}
Whether the wall class is present, with height in meters.
|
Synscapes 2020 |